



- Home
- /
- News
- /
- Industry News
DC or AC Gearmotor: What Are the Gains?

A DC or AC gearmotor can either have in-line or right-angle gearing configuration. In-line modifications have lower backlash, thus providing more efficient speed-to-torque conversion and enhanced positioning accuracy.
Their specific feature is an output shaft aligned with the motor shaft to form one line. In-line reduction gears are typically less expensive than reducers of the right-angle configuration.
Gearmotor in close-up
As evident from the name, a gearmotor is a DC or AC electromotor merged with a gear train into a single housing. The train is a simple mechanism meant to reduce the rotational speed of an engine, while increasing its torque. On the inside, it comprises a set of gears engaging with each other to create a mechanical advantage expressed as a gearhead (reduction) ratio.
The value quantifies to what extent the train can affect the rotational force of a gearmotor. For instance, when applied to a 100 RPM and 10 Nm motor, the ratio of 1:10 enables achieving the output of about 100 Nm, less gearbox efficiency losses.
Apart from multiplying the moment of force, a gearhead allows to balance load inertia against that of the motor. With a reduction gear, initial load inertia to be handled by a gearmotor during operation is decremented by the square root of the reduction ratio. The balancing enhances responsiveness and throughput of a motion solution as a whole, while eliminating overshoot and settling time issues.

Though a widely used alternative torque-boosting method is to mount a stand-alone gearhead at a distance from a motor, purchasing a gearmotor provides tangible benefits, such as:
Designing and implementing powertrains gives fewer problems, while consuming less time and money. Engineers no longer have to waste effort on complex calculations to select and size up a gearbox to match a motor, which cuts related expenses. Another bonus is a chance to avoid failures due to miscalculations or incorrect installation.
In a gearmotor, the gearhead and the motor are already a seamless whole. Therefore, no additional couplings or other arrangements are needed to connect them. This eliminates misalignment problems, thus preventing deteriorated bearing performance and reduced service life of a powertrain.
DC vs. AC gearmotor
The motion hub of a gearmotor is a DC or AC motor. Besides running under different currents varieties—direct and alternating accordingly, the two varieties are dissimilar in the following:
Operation principle
DC motors have a rotating power-producing component—the rotor. The magnetic field generated by the stator remains unmoving, just as the stator itself. With AC gearmotors, it is otherwise: the armature is stationary, while the magnetic field spins permanently.
Velocity regulation
Speed control in an AC gearmotor is by changing the supply frequency, often via a drive module. With a DC motor, RPM regulation requires adjusting the rotor velocity, which is proportional to the input voltage.
Given the fundamental distinctions, DC and AC gearmotors have a range of specific features—at times working to their advantage, at times adding to their flaws:
Power supply source:
AC: Mains.
DC: Batteries and cells.
Implications: General availability of mains supply enables greater usage flexibility.
Current flow:
AC: Exposed to varying voltage supplies, electrons alternate movement directions
DC: At constant voltage, the flow of electrons is steady and unidirectional
Implications: The constant and balanced flow of energy makes a DC drive an asset to applications where precision and stable operation are foremost. However, alternating current is better suited for long-distance energy transmission and enables generating more power.
Power supply
AC: Single- or three-phase
DC: Single-phase
Implications: When two motors have identical specifications, the size of a three-phase type is usually smaller.
Commutation
AC: No mechanical commutation
DC: Can have brushes and commutators
Implications: With additional mechanical components, such as brushes, a direct-current engine has inferior service life expectations and increased failure rates. Mechanical commutation also imposes speed restrictions, whereas AC motors have no upper velocity limit.

Additionally, commutation is the cause why a DC motor typically requires more extensive and frequent maintenance than an AC gearmotor.
Efficiency subject to specific losses
AC: Current losses attributable to induction and slip
DC: Increased initial resistance in the winding, as well as losses resulting from brush friction and Eddy currents.
Implications: DC actuators are claimed to be more efficient. An AC gearmotor consumes more electric energy to power the magnetic field and overcome their specific losses.
Inherent characteristics and admissible applications
AC: Capable of generating varying torque quantities, start with a higher velocity and consume less power at startup
DC: Deliver considerable moment of force even at low RPMs; have a more compact size
Implications: DC motors are extensively used in systems with constant torque loads (e.g., elevators, conveyors). When variable rotational force is essential (e.g., pumps, compressors), an AC gearmotor is a better choice. AC actuators drive large industrial machines, while DC ones are mostly used in smaller domestic appliances, as well as in confined spaces. Since AC gearmotors have no brushes, they are spark-free and safe to use in those environments (e.g., explosive) where the direct-current variety is out of question.
Gearing configuration and gear types
A DC or AC gearmotor can either have in-line or right-angle gearing configuration. In-line modifications have lower backlash, thus providing more efficient speed-to-torque conversion and enhanced positioning accuracy. Their specific feature is an output shaft aligned with the motor shaft to form one line. In-line reduction gears are typically less expensive than reducers of the right-angle configuration.
Output shafts of gearheads with the right-angle configuration are positioned at 90 degrees relative to the engine shaft. Right-angle modifications are preferred where one needs to fit a gearmotor into a tight space.
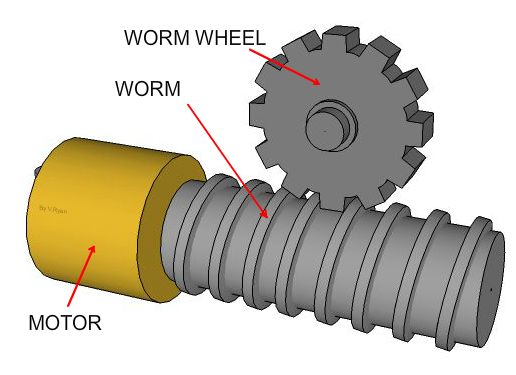
Worm. A gear set of the type includes a worm with screw-like threading and a wheel resembling a spur. In simple right-angle configuration, the gearing mechanism boast low inertia and insignificant backlash, resulting in increased precision.
The mechanism produces considerable static torque, enabling a gearmotor to hold exact positions. However, because of the sliding action, its efficiency is reduced. The specifics of its design makes motion in the reverse direction impossible.
Planetary. A planetary gearhead incorporates a sun gear that drives a number of planetary gearwheels moving inside a larger ring cogwheel. This type features excellent torque output in a small footprint, while providing fine inertia matching to reduce settling time. Its backlash is low, and its power-transmission efficiency is great, with losses not exceeding 3% per stage. Its biggest disadvantages are complex design and excessive bearing loads.
Strain-wave. Strain-wave gearing relies on dynamic elasticity in metals to decrease RPM rates and increase torque. The mechanisms include a wave generator and two splines—a flex one and a circular one. The oval-shaped wave generator contains a bearing and a disk made of steel. The non-rigid part, the flex spline, has teeth on its external outline.
The circular spline is stiff, and its teeth are located around its inner diameter—their number equal to the teeth quantity on the flexible part plus two. The mechanism is lightweight and small-size; its backlash is close to zero. With exceptional gearing efficiency, it enables generation of impressive torque quantities. Some of its most notable flaws—inferior torsional stiffness and poor mechanical wear resistance.
Flat or round spur. In a spur gear set, teeth have straight edges and require parallel alignment to function correctly. The mechanism is inexpensive and compact, but capable of delivering high reduction ratios, which makes it ideal for motor systems with space restrictions. Its biggest drawback is noise, which gets real loud closer to maximum velocities. In addition, the wear life of the spur gearbox is short.
In addition to the above described types, some classifications mention helical, crown, bevel, hypoid, non-circular, as well as rack-and-pinion and other reduction gear types. The helical, crown, bevel, and hypoid gears differ by pitch surfaces and tooth profiles. The non-circular models have undergone shape optimization to achieve reduced wear, minimum noise and maximum efficiency. The rack-and-pinion type—a combination of a rack and a toothed bar—are used to convert rotation into linear motion.
Key: Vertical 3 Phase ac induction motors, electric motor, Vertical Inverter Duty motor, DC Brake motor Oil Pressure Motor, helical gear motor, AC mini Induction DC gear motor, Gear reducer motor series, NMRV NRV worm reducer series, Worm reducer series, Horizontal Inverter duty, worm gear series, ac motor, vertical gearmotor, helical horizontal gearmotor, gear reduce motor, bevel gearmotor, cyclo gear motor, NMRV gear motor, worm reducer
Newer articles
- The Common Industrial Applications of Worm Gear Motors (23/09/2020)
- Industrial Applications Where Worm Gears are Beneficial (24/09/2020)
- Worm Gear Applications and Usages (25/09/2020)
- Worm gears: What are they and where are they used? (25/09/2020)
- What Is a Gearmotor? (23/09/2020)
- 10 Advantages of Geared Motors (23/09/2020)
- Why Proper Filtration Is Critical To Your Industrial Gearbox (10/09/2020)
- Prevent Overheating By Reducing The Temperature Of Your Gearbox (14/09/2020)
- 4 Helpful Noise Reduction Strategies For Industrial Gearboxes (21/09/2020)
- A Guide To Purchasing Gearboxes And Geared Motors (22/09/2020)
Older articles
- How Temperature Can Affect Your Industrial Gearbox (10/09/2020)
- Gearmotors: Types and Industrial Applications (02/03/2020)
- Choosing a Brushless Motor and Manufacturer (03/09/2020)
- High Torque Gear Motors (08/09/2020)
- Five tips for better electric motor maintenance (27/07/2020)
- Gear Motor Maintenance (28/07/2020)
- Top 10 tips for industrial gearbox inspection and maintenance (30/07/2020)
- Gearing servo motors for improved performance (03/08/2020)
- Gearbox service factor and service class explained (05/08/2020)
- How to design quiet gearmotors (17/08/2020)
Join